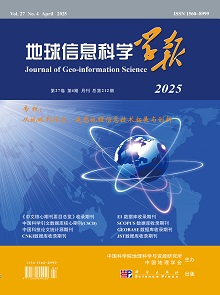
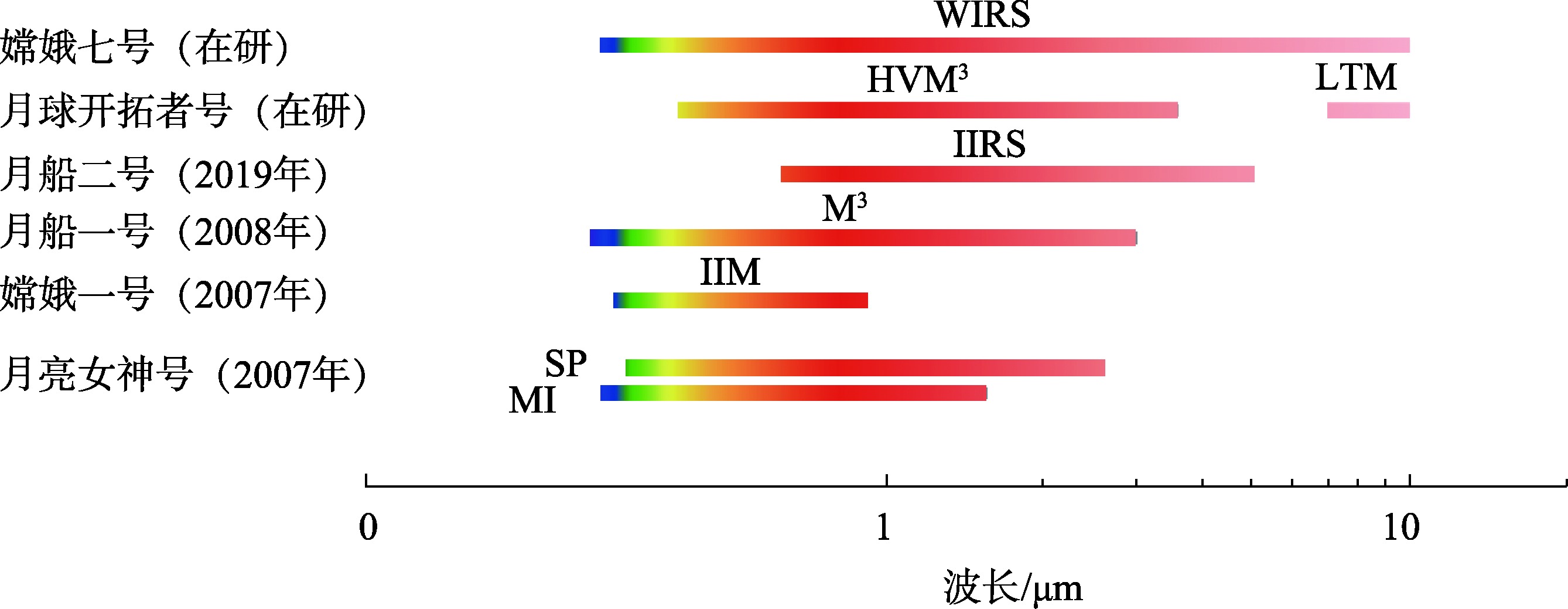
【意义】月球形貌遥感测绘是保障月球探测任务安全实施和推动月球科学研究的关键手段,对于理解月球地质演化和地月系统的形成具有重要意义。【进展】近年来,随着国内外对月球探测的兴趣与投入不断增加,遥感技术的创新推动了月球形貌测绘精度和覆盖范围的显著提升,各类遥感任务获取了大量多源、多模态和多尺度的数据,为技术突破奠定了基础。然而,数据量和复杂性的急剧增加,带来了形貌测绘处理的严峻挑战。本文全面综述了月球形貌遥感测绘的发展现状,重点梳理第二次探月热潮以来月球遥感探测任务的实施与数据获取情况,系统总结了激光高度计测高、光学摄影测量以及合成孔径雷达地形测量等关键测绘技术的最新研究进展与应用。【展望】对月球形貌遥感测绘领域的发展趋势与未来可能面临的挑战进行了深入探讨和展望,针对传感器能力提升、月球绝对参考框架优化、多源数据融合精细建模、海量遥感数据智能高效处理、以及推动科学应用水平发展的前景等方面给出了建议。
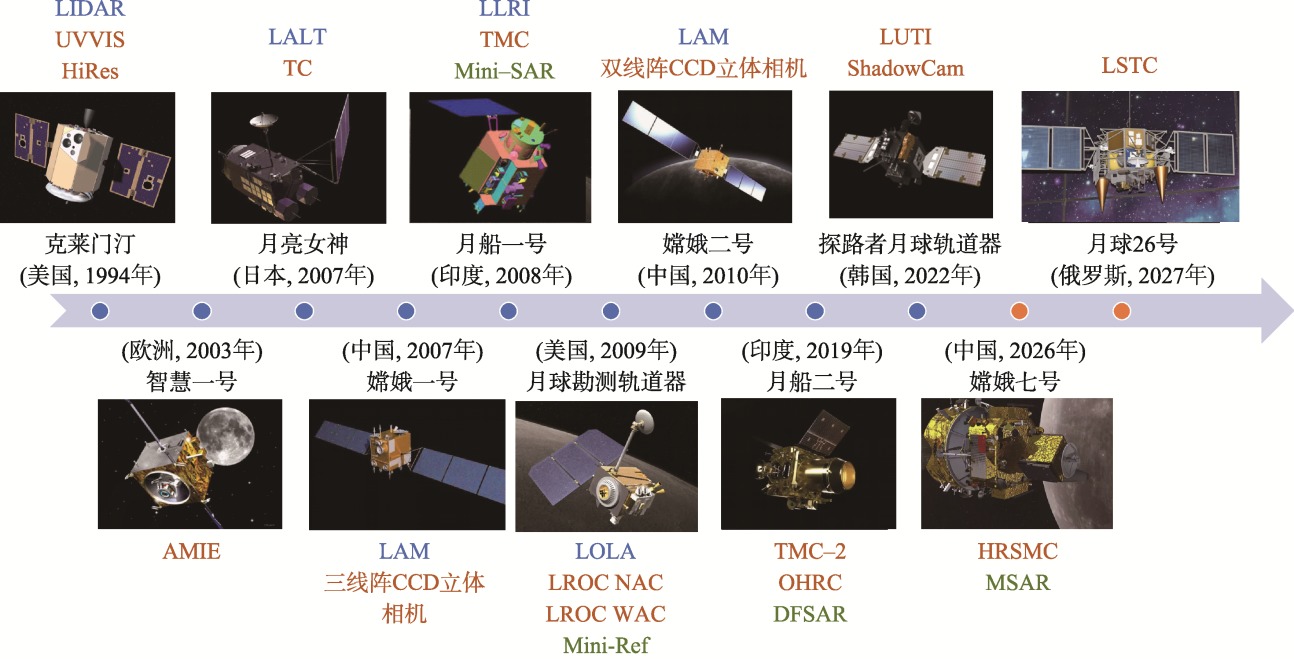
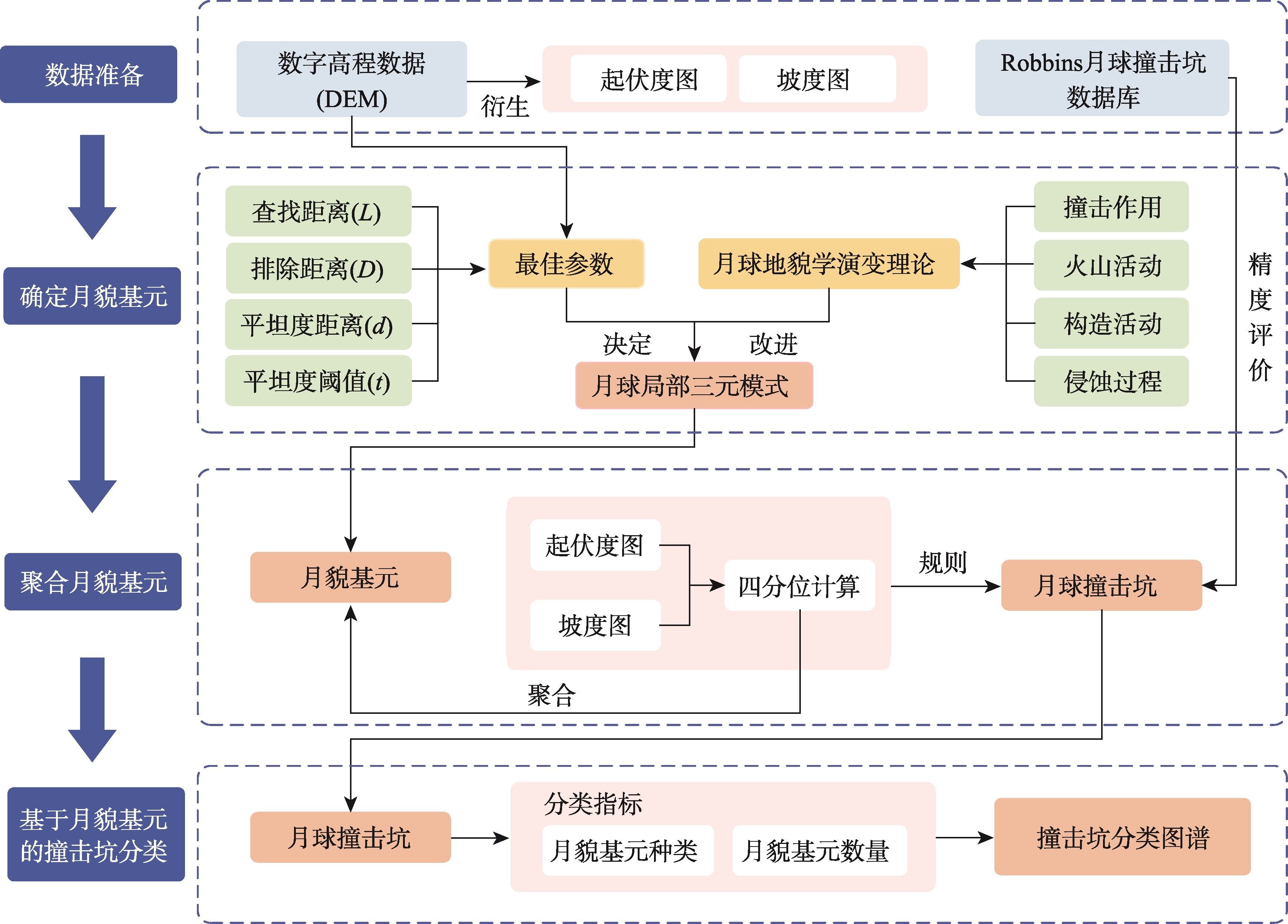
【目的】月球撞击坑的识别与分类对探测器着陆点的选择和月球年龄的估算至关重要。然而,由于撞击作用形成了复杂的月貌形态,像素级不可再分的微观月貌特征的研究面临诸多挑战。基于此,对微观月貌特征的识别需要采用尺度自适应的方法,同时应充分考虑微观月貌特征来完善月球撞击坑分类图谱。【方法】本研究引入了一种基于地貌基元的尺度自适应算法,用于自动分类微观月貌。首先,该算法通过优化地形参数来定义月球地貌的局部三元模式,并依据优化后的局部三元模式确定月貌基元。然后,依据地形起伏度和坡度的规则将月貌基元进行聚合,以识别大范围内的月球撞击地貌单元。最后,基于月貌基元构建加加林环形山区域的月球撞击坑分类图谱。【结果】该方法提取了月球微观形貌基本单元,实现了多尺度撞击坑识别,精确率达到88.24%,召回率为84.96%, F1分数为86.57%。最终建立了撞击坑分类图谱,包括简单酒窝型、小规模碗型、小规模平底型、小规模中央峰型、中等平原型、中等中央峰型、大环状平原型和特大复杂型。【结论】该方法在识别撞击坑时展现了稳健性和高效率,并且识别和分类后的撞击坑为月球地貌学和地质学分析提供了多尺度的地貌单元。
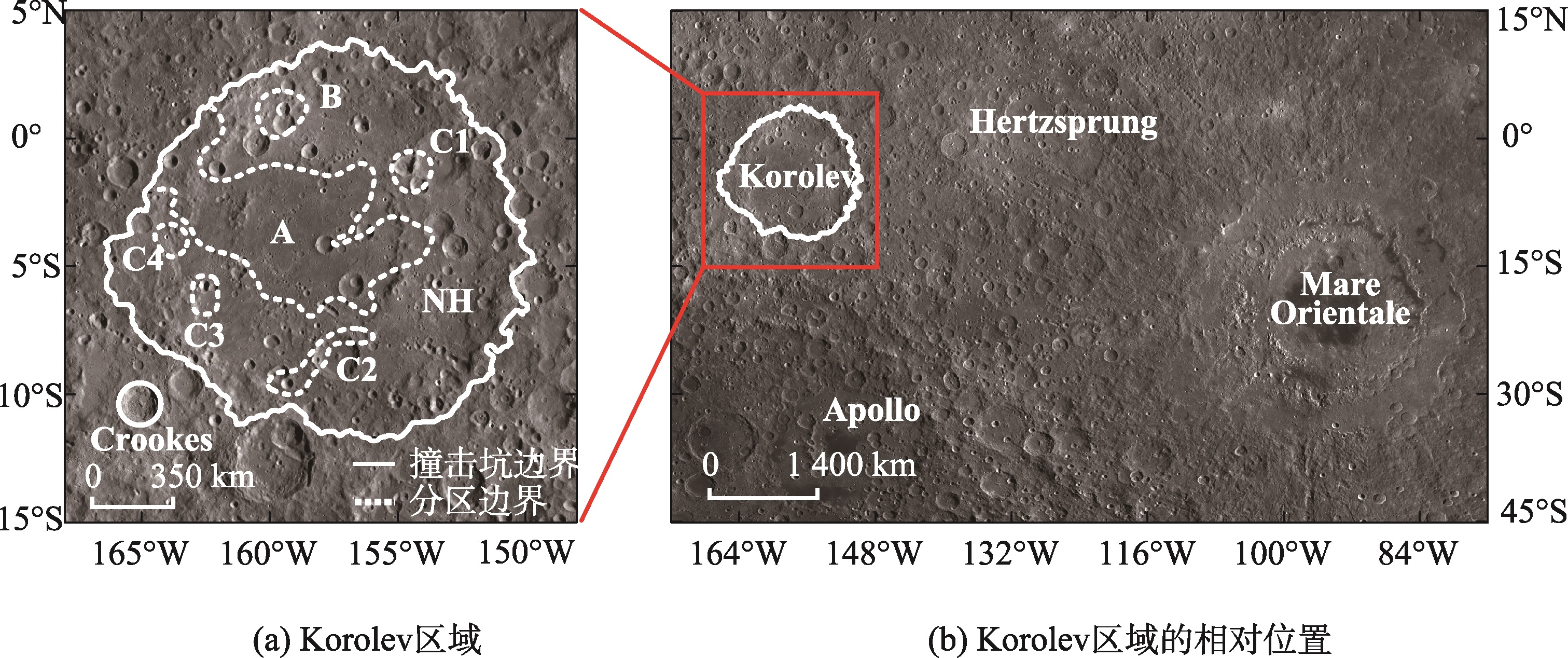
【目的】Korolev盆地位于月球背面斜长质高地地体和全月地形最高的区域内,是月球地球物理网络任务计划开展地物测量的唯一的月背着陆点。Korolev盆地表面物质的微波热辐射特性研究可以为该任务的开展提供新的重要科学参考。【方法】基于嫦娥2号卫星微波辐射计数据,采用基于Delaunay四面体剖分的重心插值方法生成了研究区亮温图,并进一步得到了亮温差图;基于Clementine UV/VIS数据,制作了研究区FeO和TiO2含量图;基于Diviner数据,制作了研究区岩块丰度图;结合Th元素含量图和布格重力图,详细评估了Korolev盆地浅层月壤的微波热辐射性质。【结果】① 利用四象限分析和剖面分析方法,发现和确认Korolev盆地中部和西北部存在微波热异常; ② 发现盆地内环存在低亮温异常环带; ③ 发现盆地西部存在未被热红外数据识别到的岩块。【结论】① Korolev盆地底部很可能存在放射性元素富集,而且表面Th元素含量不能代表月壳深部的Th元素含量; ② 撞击事件将纯斜长岩挖掘至盆地表面。研究结果为进一步研究月背高地的热状态和浅层月壳的热活动现状提供了新的重要科学参考。
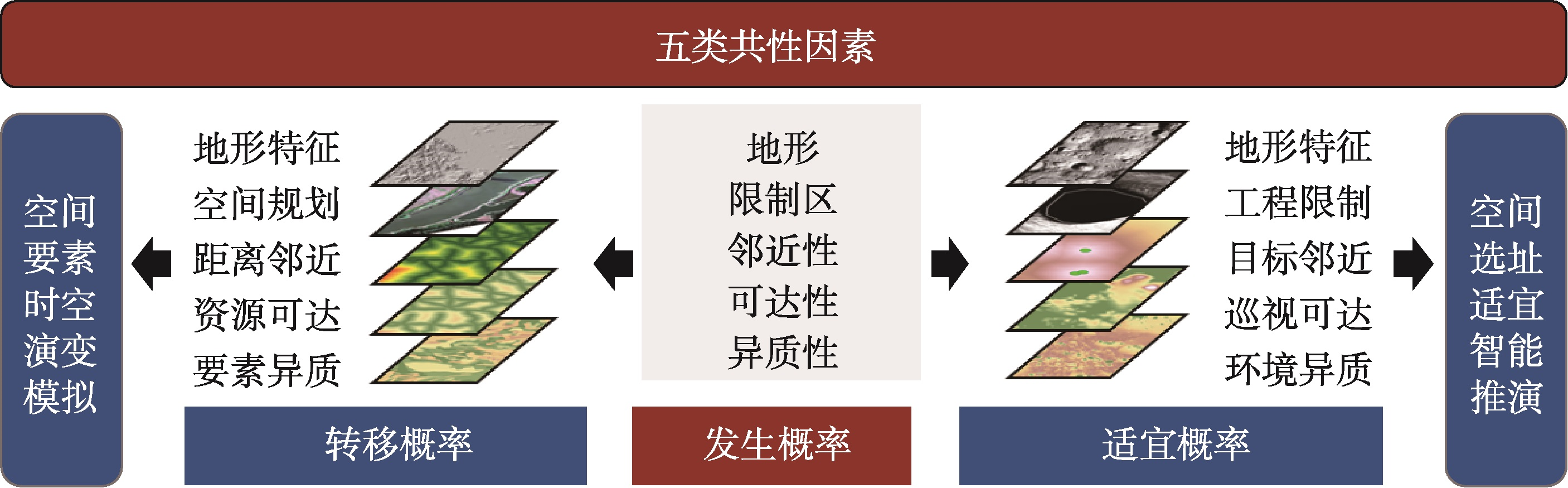
【目的】地表和深空天体的典型要素本质上是具有时变特性的空间实体,均可以用栅格和矢量的数据格式进行表达,其空间格局探测和推演依赖空间分析共性理论基础。这些要素的空间格局与可能演变情景可以用发生概率表述,其受复杂的多因素作用机制影响。【方法】为此,本文将空间格局及其演变的广泛影响因素归纳为五类:地形(T)、限制区(C)、可达性(A)、邻近性(P)和异质性(H),并提出了考虑这五类共性因素的通用发生概率推演范式(TCAPH)。【结果】为验证构建的空间分析范式和模型,针对地球表面要素中典型现象(如土地利用变化)开展了空间格局模拟与预测,同时针对月球南极de Gerlache区域月球科研站建设可能性开展了空间概率推演与适宜选址。【结论】案例研究表明,基于五类因素的发生概率建模方法适用于原生和衍生空间格局的分析及推演,解决了情景转移概率和选址适宜概率求解的难题,实现了概率构图误差最小化的空间格局表征与推演,可用于从地表要素到深空天体要素的多类空间实体分析与决策支持。
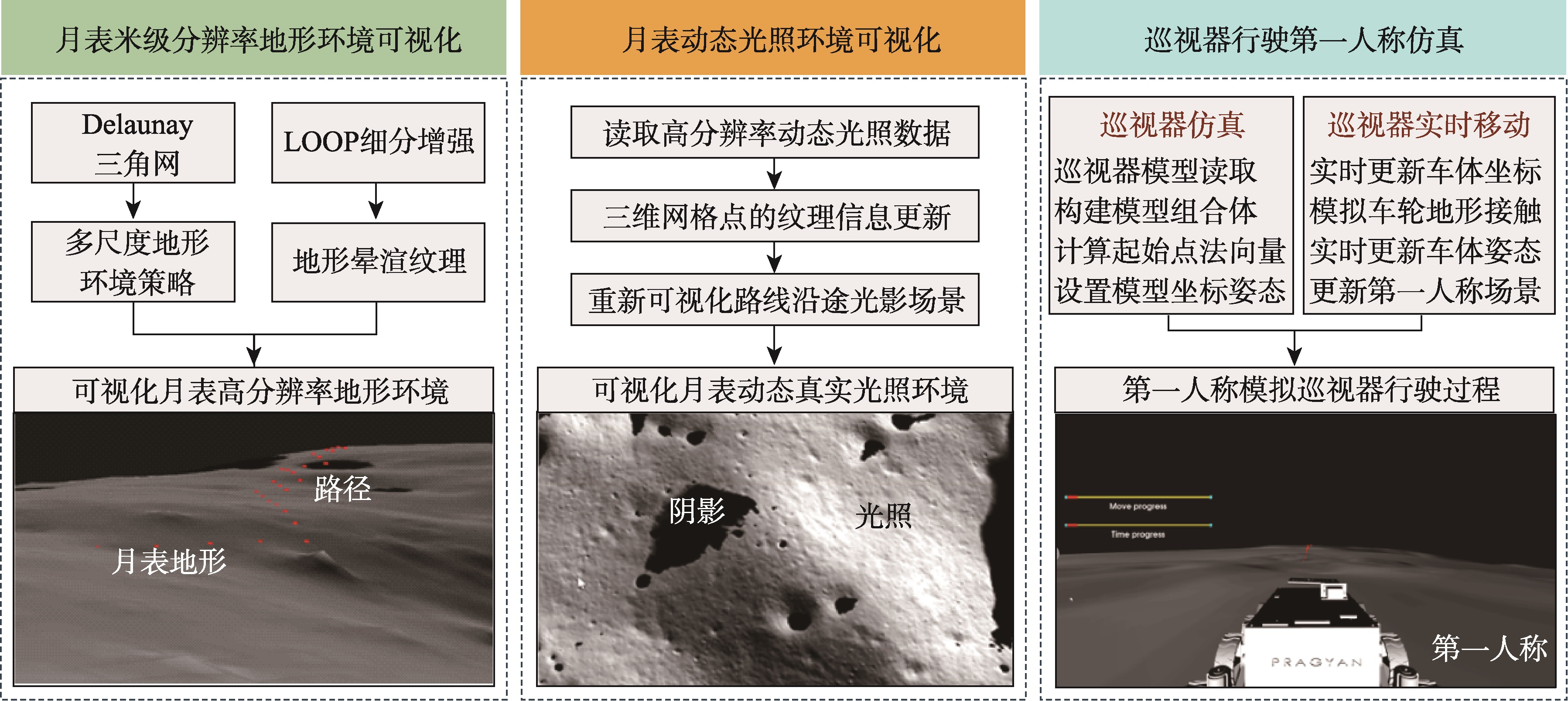
【目的】巡视器是开展月球科考与原位资源利用的重要工具,而极端复杂的地形与光照环境给巡视器探测带来高潜在风险。目前在实施探测任务前缺乏激光雷达等数据,因此开展遥感数据支持下的月球巡视器探测三维仿真方法研究,可预先评估巡视路线安全,旨在提升巡视探测任务的成功率。【方法】本文提出了一种基于Visualization Toolkit(VTK)的月球巡视器探测三维仿真方法,实现了月表米级分辨率地形环境可视化、月表光照环境更新和巡视器位置与姿态变换3个关键环节。【结果】在月球南极沙克尔顿连接脊区域的巡视三维仿真结果可以预先评估路线安全性,其中,月表三维地形环境可视化效果展现了撞击坑和山体的起伏变化,第一人称探测动态模拟有效仿真了巡视器行驶过程,直观感受到前进中的位置与姿态调整过程,有利于评估长距离巡视探测路线的安全性。模拟过程同时实现了动态光照场景实时更新,可以直接观察探测过程中的光照变化。【结论】本文提出的方法旨在实现探测任务实施前的巡视路线安全性评估,为验证未来月球探测任务的可行性提供先验信息与重要保障。
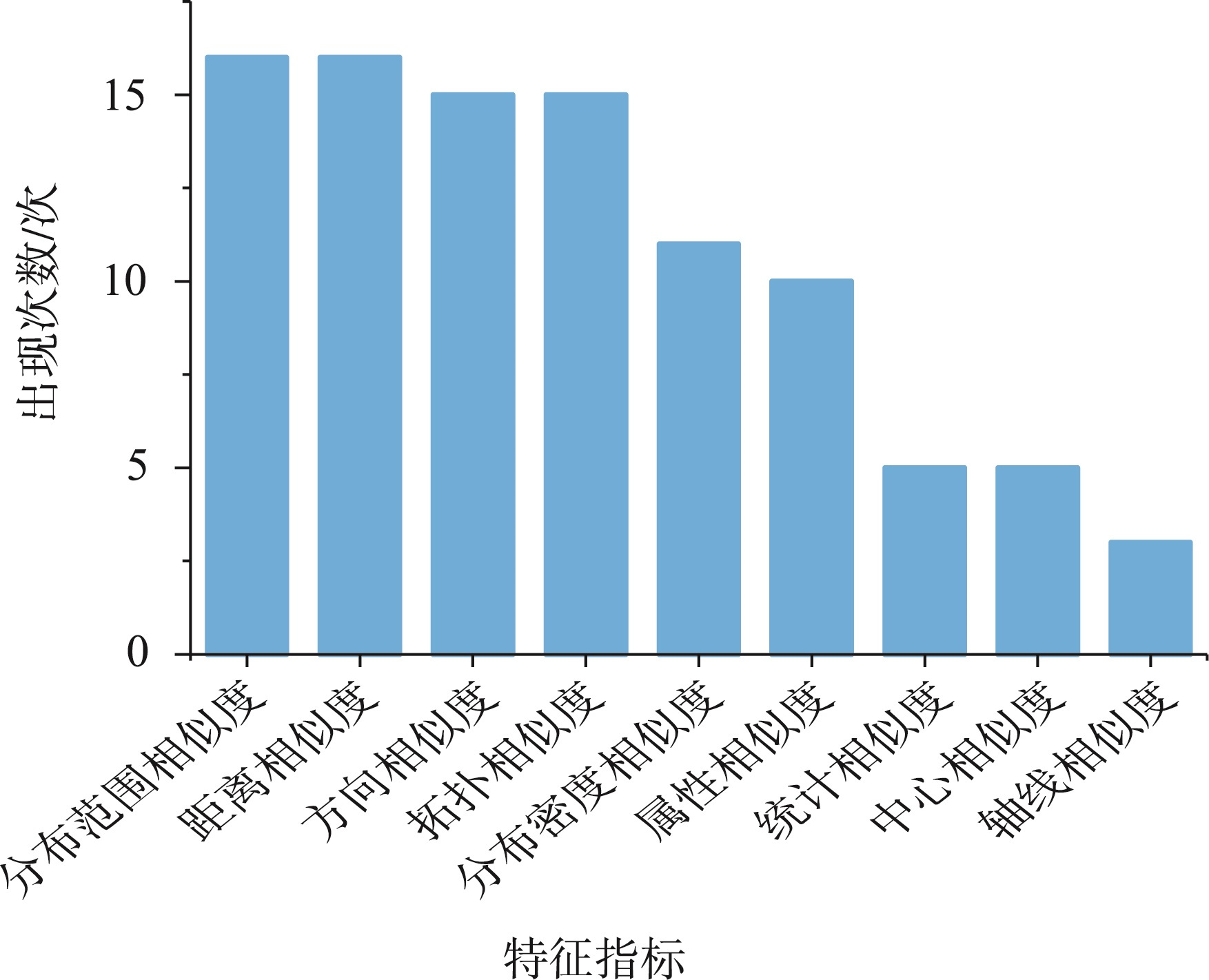
【目的】针对当前地图上点群目标空间相似关系计算模型中特征指标的选取及权重确定普遍依赖于问卷调查、专家评分或自定义权重,导致模型在客观性和通用性存在局限性。【方法】本文开展了以下研究: ① 对点群空间相似度计算模型中常考虑的特征指标进行了系统的梳理、统计与分析,并选定了属性相似度、分布范围相似度、分布密度相似度、距离相似度、方向相似度及拓扑相似度进行研究; ② 采用单一定权方法:层次分析法(Analytic Hierarchy Process, AHP)、模糊综合评价法(Fuzzy Comprehensive Evaluation Method, FCEM)、粗糙集理论(Rough Set Theory, RS),以及一种通过拉格朗日优化决策模型将AHP与RS结合的综合定权方法:AHP-RS组合权值法,采用上述方法分别计算各特征指标的权值及权重排序; ③ 将AHP-RS组合权值法确定的权重应用于点群空间相似度计算模型。【结果】① AHP-RS组合权值法不仅保持了与AHP和FCEM一致的权重排序,还显著减弱了RS对数据过于敏感导致权重排序不合理问题,同时大幅缩小了权值间的差异,使得权重更贴近实际情况; ② 不同尺度下点群空间相似度计算结果与人类对不同尺度下点群相似度的认知高度一致,进一步验证了AHP-RS组合权值法在权重确定上的合理性与有效性。【结论】本文最终提供了一组特征指标权重分配方案ω拓扑, ω距离, ω属性, ω方向,ω分布范围, ω分布密度=(0.36, 0.15, 0.10, 0.15, 0.12, 0.12),为点群目标空间相似度计算模型提供了客观、统一的权重依据,为空间相似关系的计算及地图综合提供了可靠的理论基础。
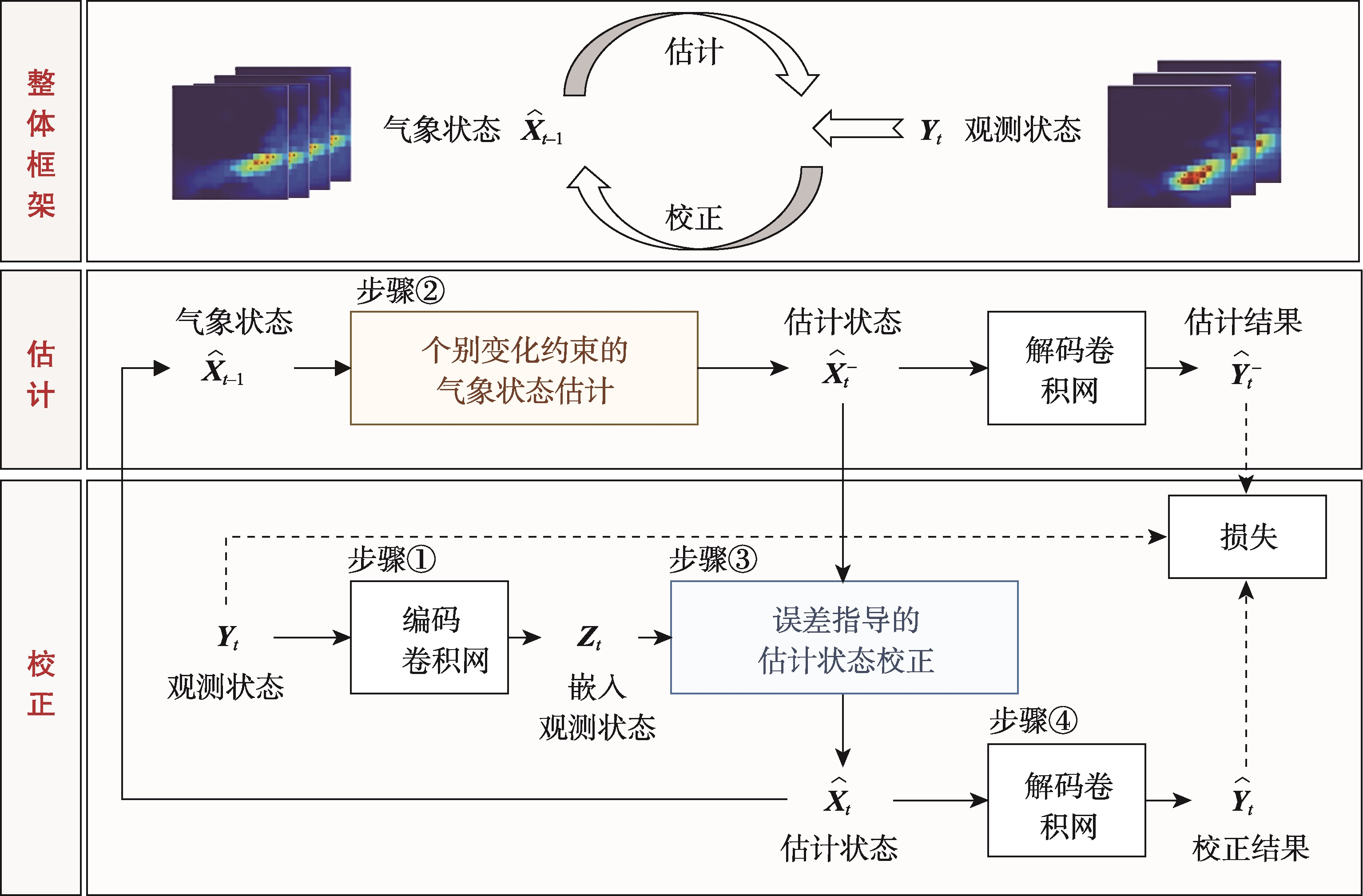
【目的】精确的暴雨临近预测在防灾减灾、工农业生产和交通运输等多方面起着重要作用,对于保障社会经济发展与人民财产安全具有十分重要的意义。然而现有暴雨智能预测方法没有充分考虑暴雨过程、观测以及建模等环节的不确定性问题,阻碍了预测准确性和稳定性的提升。【方法】本文提出基于卡尔曼“估计-校正”循环网络的暴雨临近预测方法,在个别变化理论约束下估计气象状态,并在卡尔曼滤波的指导下依据估计误差进行气象状态校正,以实现准确和可靠的暴雨预测。所提“估计-校正”网络包括个别变化约束的深度状态估计和估计误差指导的气象状态校正2个核心单元;前者根据历史气象状态估计下一时间步的气象状态及误差;后者根据估计误差和观测误差进行气象状态的校正;二者共同提升暴雨预测精度和稳定性。【结果】在ERA5和NCEP数据集上的实验证明,所提方法的暴雨预测准确性指标CSI比所对比的基线方法提升了5%,并以稳定性指标SPREAD≈0.5的成绩取得了良好稳定性。【结论】验证了在深度学习中融合滤波理论缓解不确定性问题的可行性。
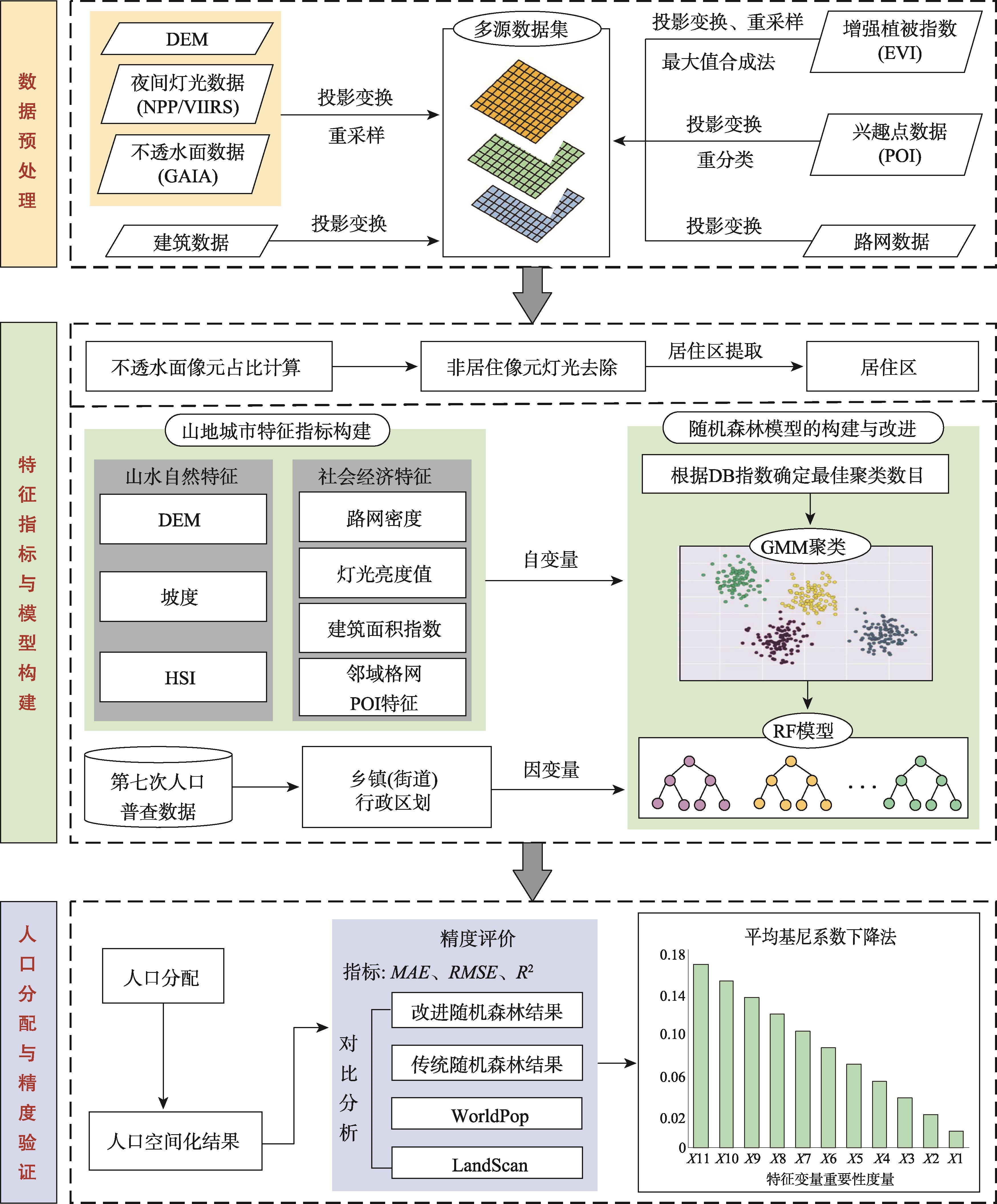
【目的】地形导致了山地城市人口空间分布差异极大。山地城市的人口空间分布信息对科学研究和地区的政策制定、资源配置、灾害评估与防护等领域具有重要意义。【方法】为准确反映山地城市人口分布,本文提出了一种基于居住区识别和改进随机森林的山地城市人口空间化方法。该方法先识别了居住区格网并应用到特征提取阶段,避免了将人口分配到非居住区。然后,构建了山地城市特征变量数据集,考虑了山地城市人口分布的空间异质性和复杂性,通过GMM聚类算法对特征变量集进行聚类。采用Bootstrap采样法从各类中随机抽取等量的数据形成新的特征变量集并作为训练数据构建随机森林模型,实现了传统随机森林模型的改进。为验证该方法的有效性,本文以山地城市重庆市为实验区,得到了重庆市150 m格网人口空间化结果,将本方法模拟结果与传统随机森林模型、WorldPop数据集和LandScan数据集进行对比,并基于随机森林模型对各特征变量进行了重要性度量。【结果】本文方法的模拟结果整体精度达到82.9%,比传统随机森林模型的模拟结果提高了2.7%,比WorldPop数据集和LandScan数据集分别提高了2.94%和10.91%。在整个实验区,与WorldPop数据集和LandScan数据集相比,本文方法的MAE分别降低了212.63和35.11,RMSE分别降低了1 354.34和524.54;在高密度丘陵区和山地地区,本文方法的精度更好,展现出本文方法对山地城市人口空间化的有效性。【结论】此外,本文方法的模拟结果在不同人口密度区和不同地形区表现出比2个已开放的人口数据集更明显的人口分布异质性特征,展现了更为丰富的人口密度信息。
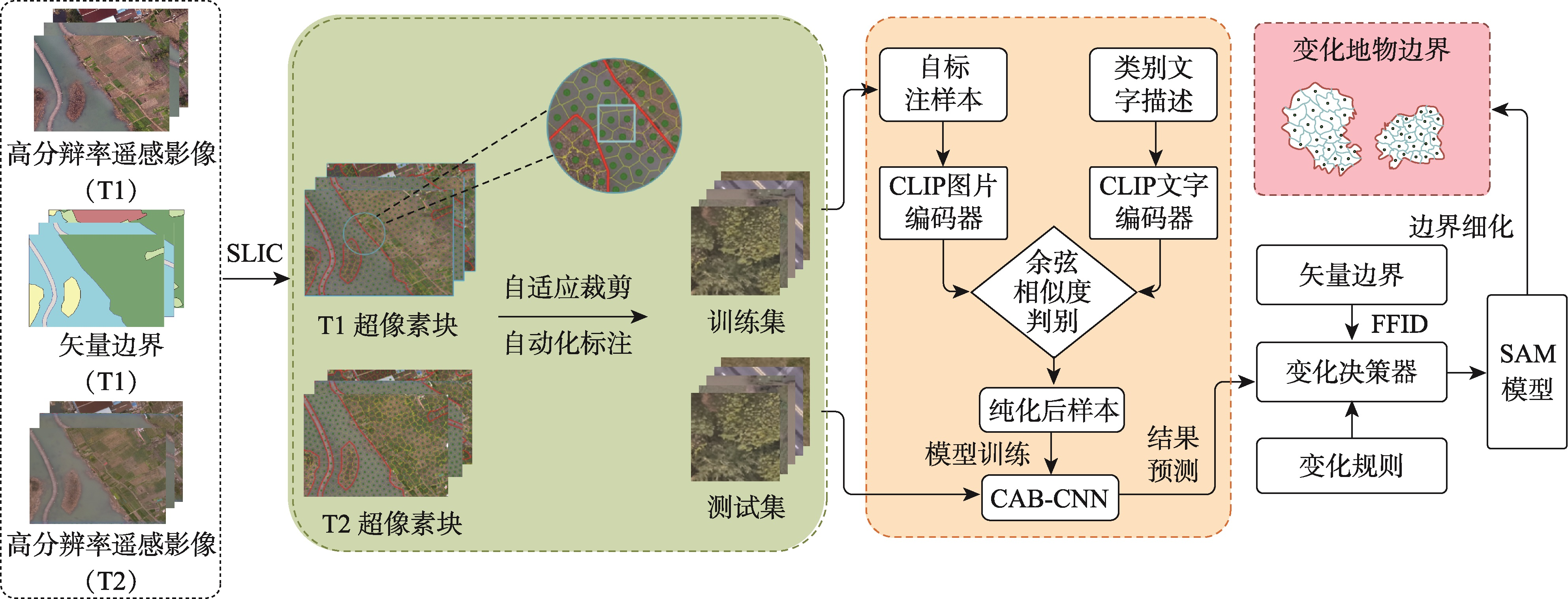
【目的】通用基础模型展现出的优秀泛化能力使其成为了人工智能领域的热门课题,然而受制于遥感影像的特殊性,这些基础模型无法直接应用于遥感视觉任务。此外,现有的变化检测方法往往依赖于大量的人工标注样本,缺乏对现有矢量数据的有效利用,无法满足高效自动化检测的要求。针对这些问题,本文提出了一种自上而下的变化检测方法,挖掘基础模型和矢量数据中的宝贵信息以减少人工参与。【方法】首先,使用改进的简单线性迭代聚类(Simple Linear Iterative Clustering, SLIC)算法,以矢量边界为约束对同一区域的双时相影像进行分割与标注,分别生成训练与测试数据。随后,利用CLIP (Constrastive Language-image Pre-training) 模型的泛化推理能力来纯化训练数据;接着,利用基于通道注意力机制的双线性神经网络(Channel Attention Bilinear Convolutional Neural Network, CAB-CNN)进行细粒度场景分类;最后,结合变化规则和后处理方法来识别变化的矢量图斑,并使用SAM(Segment Anything Model)对变化图斑进行细化。为了验证方法的有效性与普适性,本文选取两块区域作为研究对象进行定量实验: ① 江苏省扬州市广陵区,数据包含2022年和2023年的遥感影像以及2022年的土地利用矢量; ② 江苏省无锡市惠山区前洲街道,数据包含2018年和2020年的遥感影像以及2018年的土地利用矢量。【结果】本文方法在广陵区达到了86.47%和90.46%的准确率与召回率,较基于变化像元统计的方法提升了6.28%和7.90%。前洲街道研究区上的准确率与召回率分别达到了89.75%和91.37%,较基于变化像元统计的方法提升了8.65%和6.79%。【结论】本方法能够利用现有的矢量数据与基础模型,在大幅减少人工成本的情况下,定位变化的矢量图斑并对其进行细化,对于诸如耕地“非农化”检测、违法用地检查、林地覆盖调查等需要检测变化并更新图斑的任务提供了一定的辅助作用。
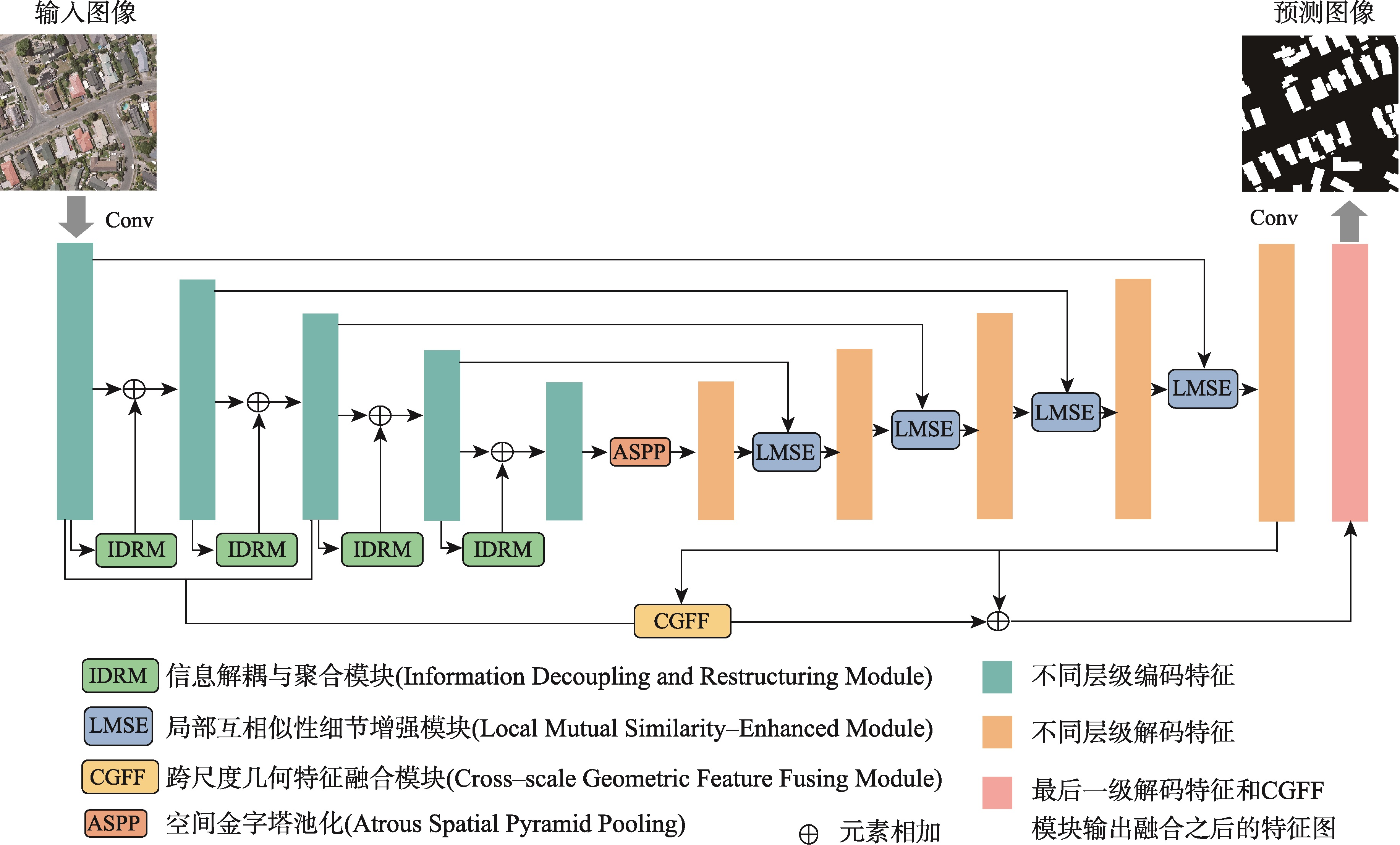
【目的】针对现有遥感影像建筑物提取模型中因冗余导致的特征表示能力差、建筑物边界不清晰及微小建筑物丢失问题。【方法】提出一种细节增强与跨尺度几何特征融合网络DCS-Net,由信息解耦与聚合模块(IRDM)、局部互相似性细节增强模块(LMSE)和引导小目标推理的跨尺度几何特征融合模块(CGFF)组成。IRDM模块通过分配权重将冗余特征分离并重构,从空间和通道2个维度抑制冗余,促进有效特征学习; LMSE模块通过动态选择窗格以及编-解码特征之间的局部互相似性指定像素聚类,提升建筑物边缘信息的准确性和完整性; CGFF模块计算原始图像与不同语义级特征图间的特征分块关系,补偿信息损失以提升微小建筑物的提取性能。【结果】本文的实验基于2个公开数据集: WHU航拍数据集和Massachusetts建筑物检测数据集。实验结果表明,与UNet、PSPNet、Deeplab V3+、MANet、MAPNet、DRNet、Build-Former、MBR-HRNet、SDSNet、HDNet、DFFNet、UANet等现有建筑物提取算法相比,DCS-Net在各项评价指标中得到了显著提升,验证了所提方法的有效性。在WHU数据集上的交并比、 F1值和95%HD达到92.94%、96.35%和75.79,对比现有最佳算法分别提升了0.79%、0.44%和1.90;在Massachusetts数据集上的指标为77.13%、87.06%和205.26,分别提升了0.72%、0.43%和13.84。【结论】DCS-Net能更为准确完整地提取出遥感影像中的建筑物,并显著缓解微小建筑物丢失的问题。
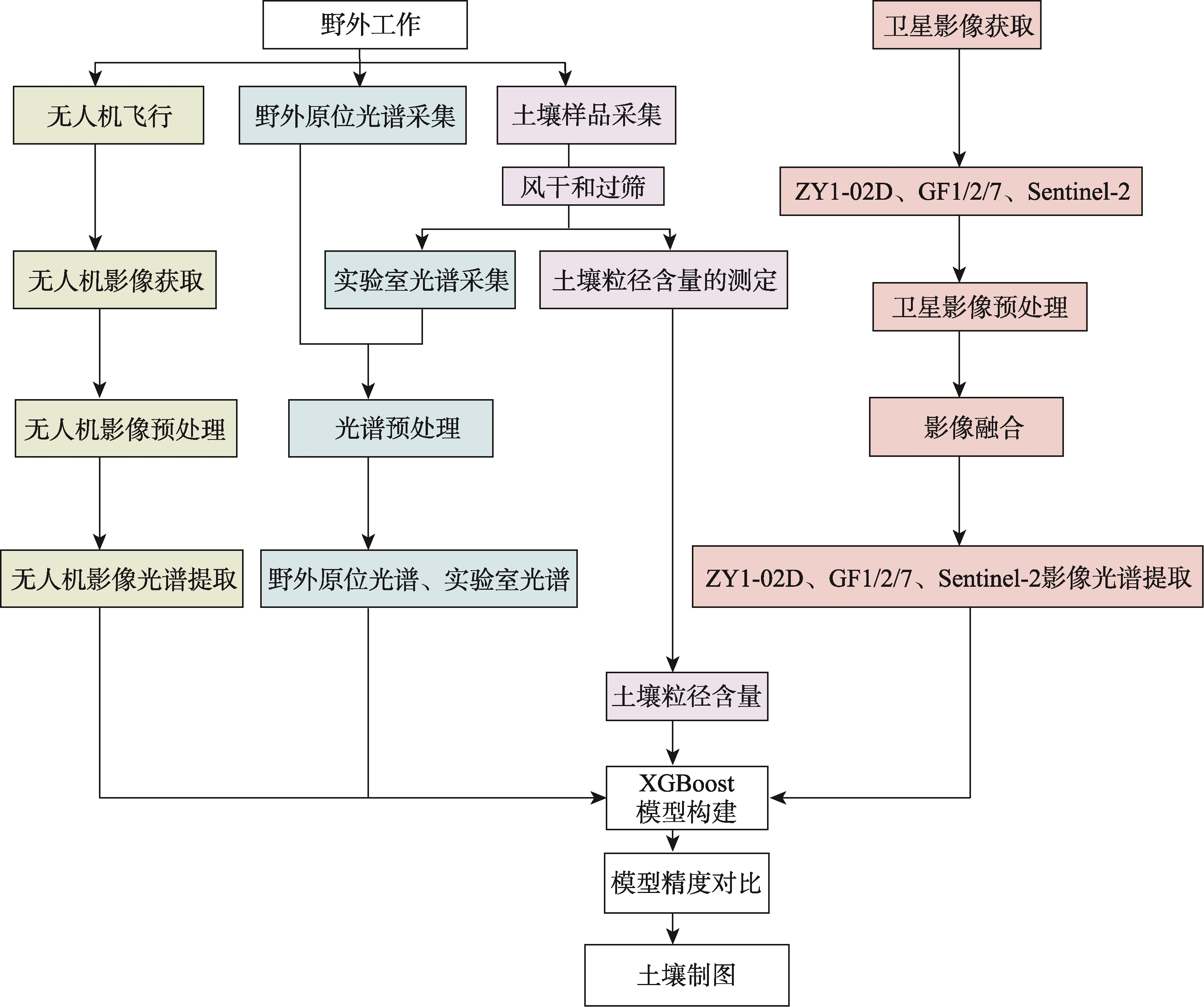
【目的】无人机及卫星遥感技术已经被成功地应用在土壤有机碳等属性的估算研究,但对土壤质地的估算相对较少,因此开展该方面的研究具有重要的应用价值。本研究以青海湟水流域互助县卓扎滩村、湟中区拦隆口镇泥隆口村和鲁沙尔镇白土庄村3个田块为研究对象,探索了无人机和卫星遥感技术在田间尺度上估算土壤质地含量的应用潜力。【方法】基于无人机平台分别搭载2台高光谱相机对各农田土壤进行无人机成像、利用地物光谱仪收集土壤野外原位光谱、采集土壤样品,共获得2022—2024年838份土壤样品;此外,获得相近时间的GF1/2/7 (Gaofen1/2/7)、Sentinel-2 A和ZY1-02D (Ziyuan 1-02D)影像数据;实验室测试各样品的土壤粒径并采集土壤室内光谱数据。在上述数据的支持下,利用XGBoost (Extreme Gradient Boosting)方法分别对土壤质地含量与实验室、野外原位、无人机、GF、ZY1-02D和Sentinel-2光谱进行统计建模与估算,进一步对土壤质地含量进行空间分布制图。【结果】① 在XGBoost方法的模型结果中,无人机影像光谱的最优模型精度RPD为2.441,GF1/2/7、ZY1-02D和Sentinel-2卫星影像的最优模型精度RPD分别为1.815、1.601和1.561; ② 基于无人机和卫星影像的估算精度要低于地物光谱仪测得的光谱估算精度,具体为:实验室光谱>野外原位光谱>无人机影像光谱>GF1/2/7卫星影像光谱>ZY1-02D卫星影像光谱>Sentinel-2卫星影像光谱;在土壤质地含量的估算结果中,黏粒含量的精度最高, RPD最高可达2.70,粉粒次之,RPD为2.24,砂粒含量的精度最低, RPD为1.91; ③ 砂粒和黏粒含量与土壤光谱反射率呈现出负相关关系,而粉粒含量则呈正相关关系,砂粒、粉粒和黏粒的敏感波段主要集中在近红外波段范围(780~2 400 nm); ④ 砂粒、粉粒和黏粒的含量在3年内变化较小,表现出相对稳定的状态,3个田块通过制图结果得到的土壤质地含量主要为:67%<砂粒≤83%、10.6%<粉粒≤19.1%和3.2%<黏粒≤6.6%。【结论】对田间尺度来说,无人机影像是土壤质地含量制图的最佳数据源,能够有效服务于精准农业管理,而GF1/2/7与ZY1-02D卫星影像基本满足质地制图的要求, Sentinel-2卫星影像对田块尺度制图则较为粗糙。
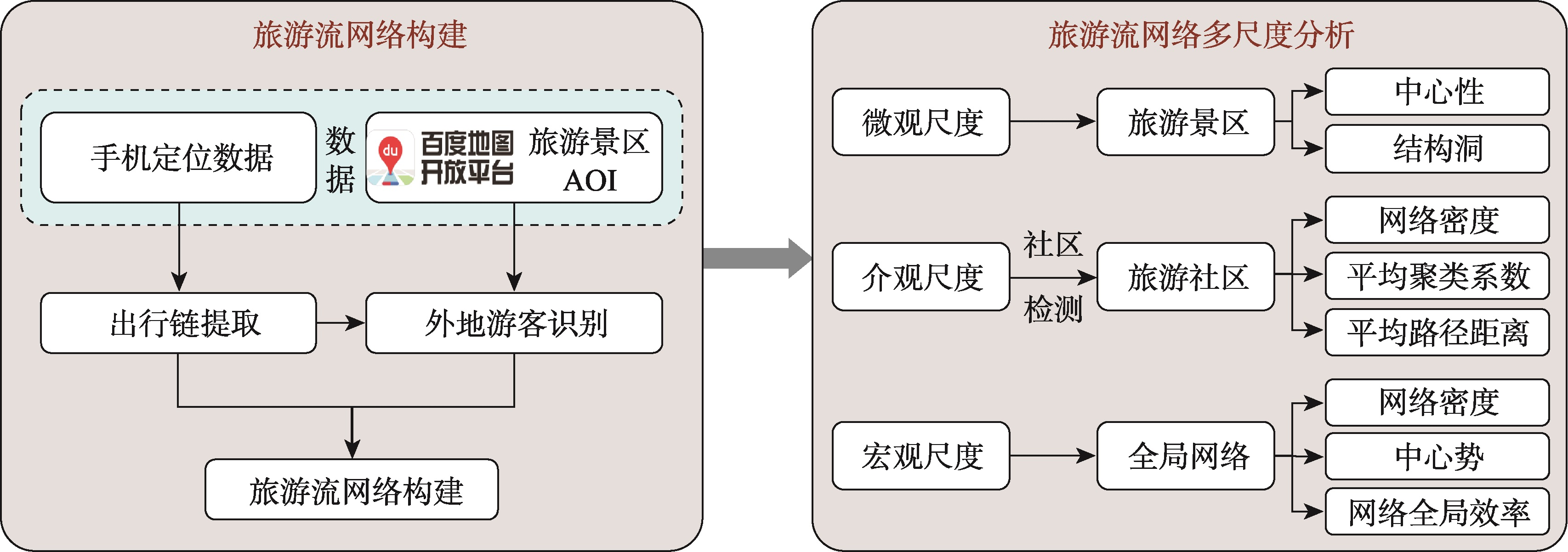
【目的】揭示旅游流网络结构特征是景区优势互补和协调发展的前提条件。【方法】本文基于大规模手机定位数据,综合运用出行链提取、社会网络分析以及社区检测等方法构建了多尺度旅游流网络分析框架,在微观、介观和宏观尺度挖掘长沙市旅游流网络结构特征。【结果】① 微观尺度:长沙市旅游流网络呈现显著的中心化趋势,岳麓山国家重点风景名胜区和橘子洲景区等少数节点在网络中的影响力较大。仅有33%的节点的结构洞效能和效率大于均值且约束性小于均值,网络结构洞现象突出,整体连通性和效率受限; ② 介观尺度:长沙市的旅游流集中程度较高,呈现明显的空间聚集特征。旅游流网络被划分为6个旅游社区。各社区内通常有2个核心景区带动游客对周边景点游览,不同旅游社区发展不平衡,存在以岳麓山国家重点风景名胜区和橘子洲景区为核心的超大旅游流社区; ③ 宏观尺度:旅游流网络呈现“单核强集聚、整体分散”分布特征,形成以市中心为核心向外扩散的多圈层结构。旅游流网络的网络全局效率仅为0.367,部分边缘地区的景区可达性较差,核心景区对边缘景区的“涓滴效应”有限。
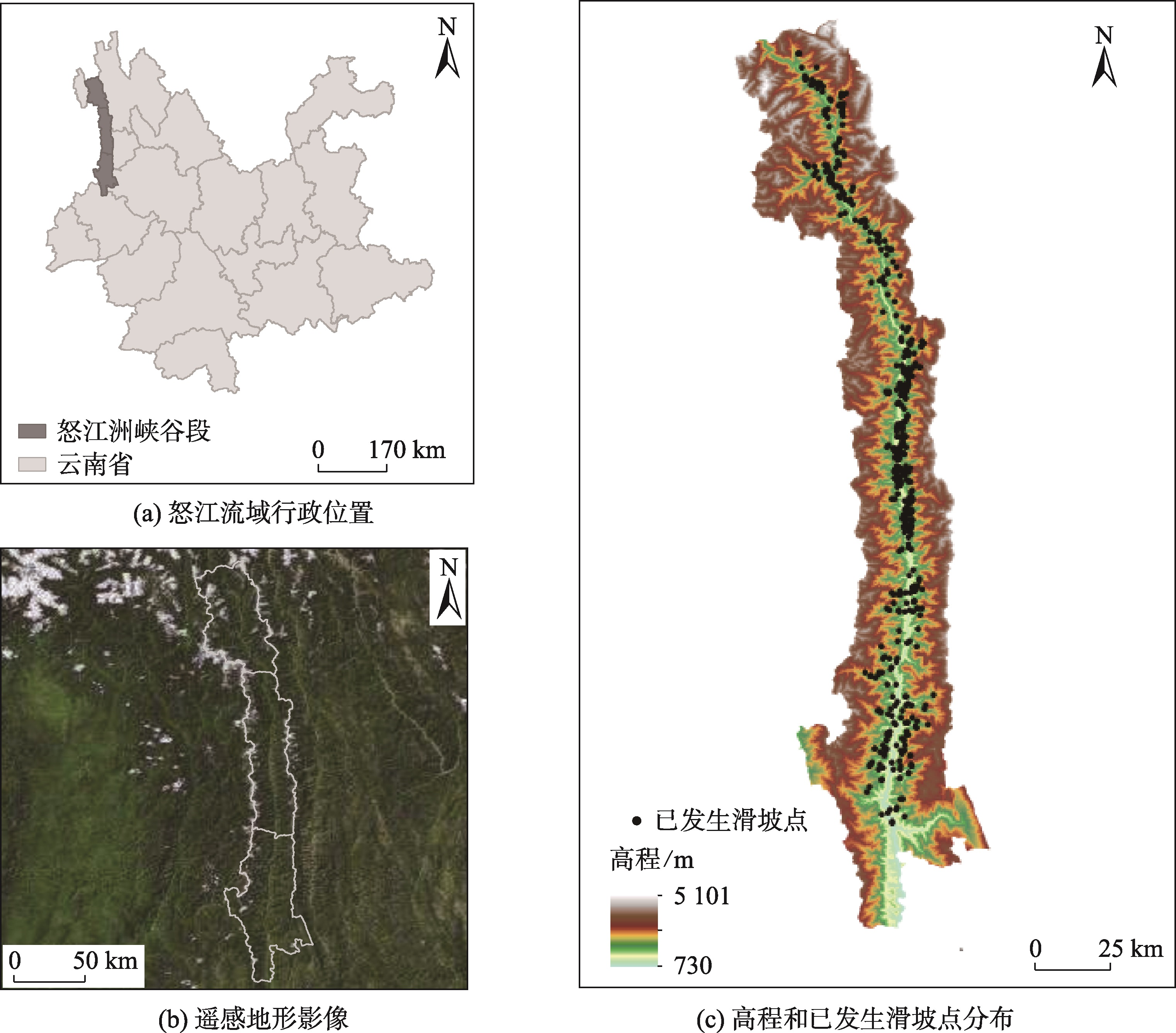
【目的】滑坡易发性评价过程中负样本选择和机器学习模型对结果的影响不容忽视。【方法】为探究这2种因素对滑坡易发性评价结果的影响规律,本文以怒江流域怒江州峡谷段为例,在提出利用加权信息量模型对负样本选取优化的基础上,选取了包括起伏度、土地利用和多年年均降雨量在内的13个影响因子,分别采用支持向量机模型、卷积神经网络模型、梯度提升决策树模型3种机器学习模型,与传统随机样本选取方法进行了滑坡易发性对比研究,并针对降雨因子对易发性分级的影响进行分析。【结果】① 基于优化后负样本的各模型评价结果在滑坡密度方面均有提升,分别提升0.010 3、0.0639、0.004 0; AUC值均相对升高,分别升高0.033、0.018、0.008; ② 在易发性评价结果中,梯度提升决策树模型最优,较支持向量机模型、卷积神经网络模型精度分别提高了3.8%和1.7%; ③ 将2019—2020年的夏、冬季平均月降雨量数据引入梯度提升决策树模型,结果显示夏季高、较高易发区面积增大,尤其是南部六库镇和上江镇地区。【结论】基于加权信息量模型优化负样本是合理的,梯度提升决策树模型作为滑坡易发性评价模型较适用于怒江州峡谷段地区的孕灾环境,降水对该地区滑坡易发性具有明显影响。本文所提出的研究思路对区域防灾减灾体系构建具有重要的实际意义,同时也为未来的区域规划提供科学依据。
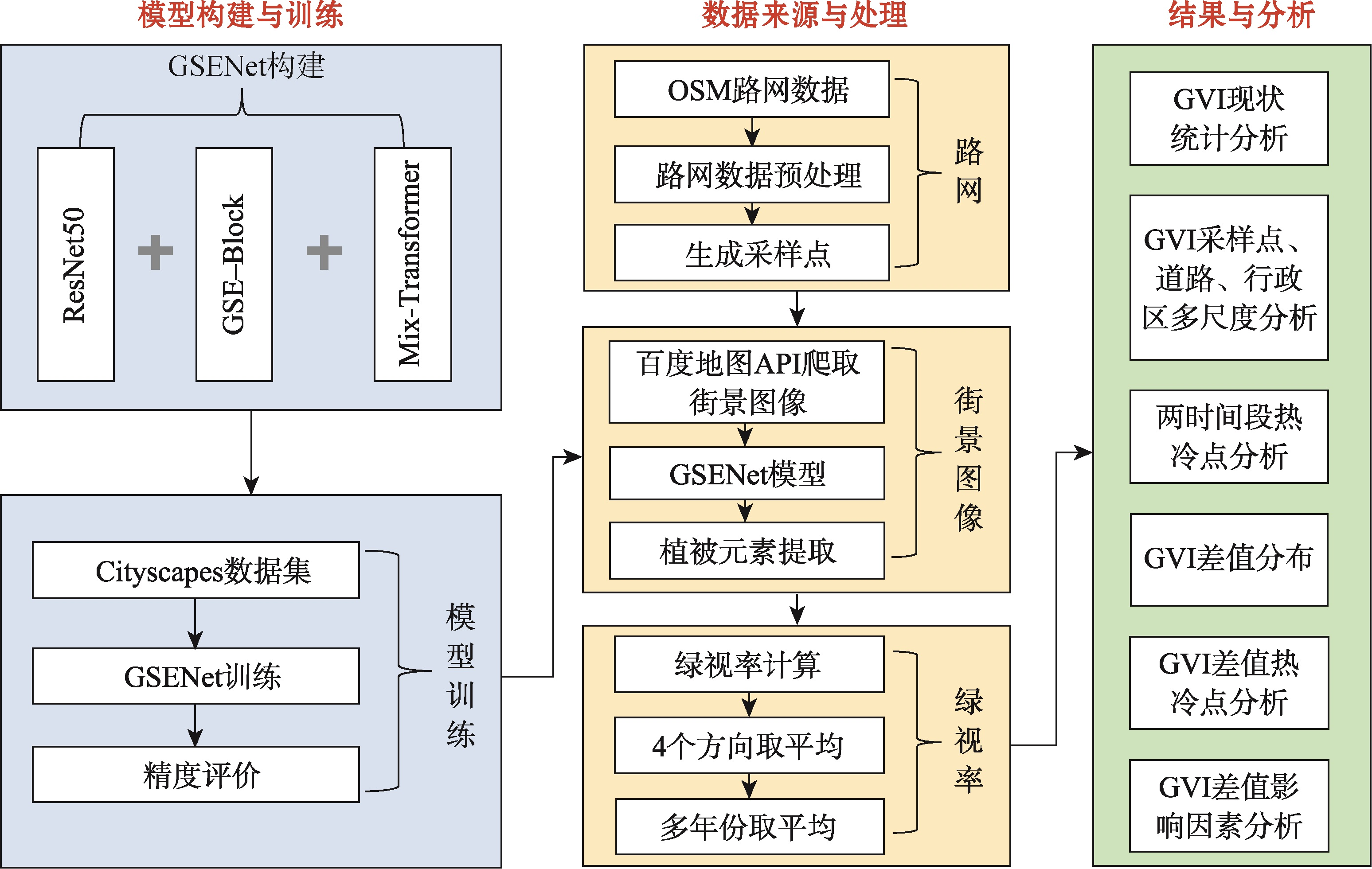
【目的】探索基于街景数据的城市绿视率时空变化特征及其影响因素,为城市街道绿化水平评估提供新方法。【方法】提出GSENet语义分割模型,在编码器中整合GSE-Block特征校准模块,解码器采用高效自注意力模块(Mix-transforemr)。基于该模型分析2014—2023年兰州市主城区百度街景数据,运用热冷点分析、统计分析、相关性分析方法探索绿视率时空变化规律。【结果】① GSENet模型以ResNet50为主干网络,MIOU达74.7%,优于PSPNet、DeepLabV3等主流模型,大面积类别F1分数可达0.95; ② 2019—2023年相比2014—2018年, GVI平均上升2.3%,70.9%的采样点显示出上升趋势。安宁区提升最显著,城关区提升最小。研究区中部偏西及东北部地区GVI显著上升,特别是在高校周边区域;商业中心和交通枢纽附近,GVI出现明显下降; ③ 建筑密集度与GVI变化呈负相关,道路宽阔度与GVI变化的相关性较弱;人口密度与GVI变化在街道尺度下呈现出较强的正相关。【结论】基于GSENet模型的街景绿视率测算方法具有较高准确性,可有效评估城市绿化水平的时空变化特征,为提升街道绿化感知程度和城市空间规划提供重要参考。
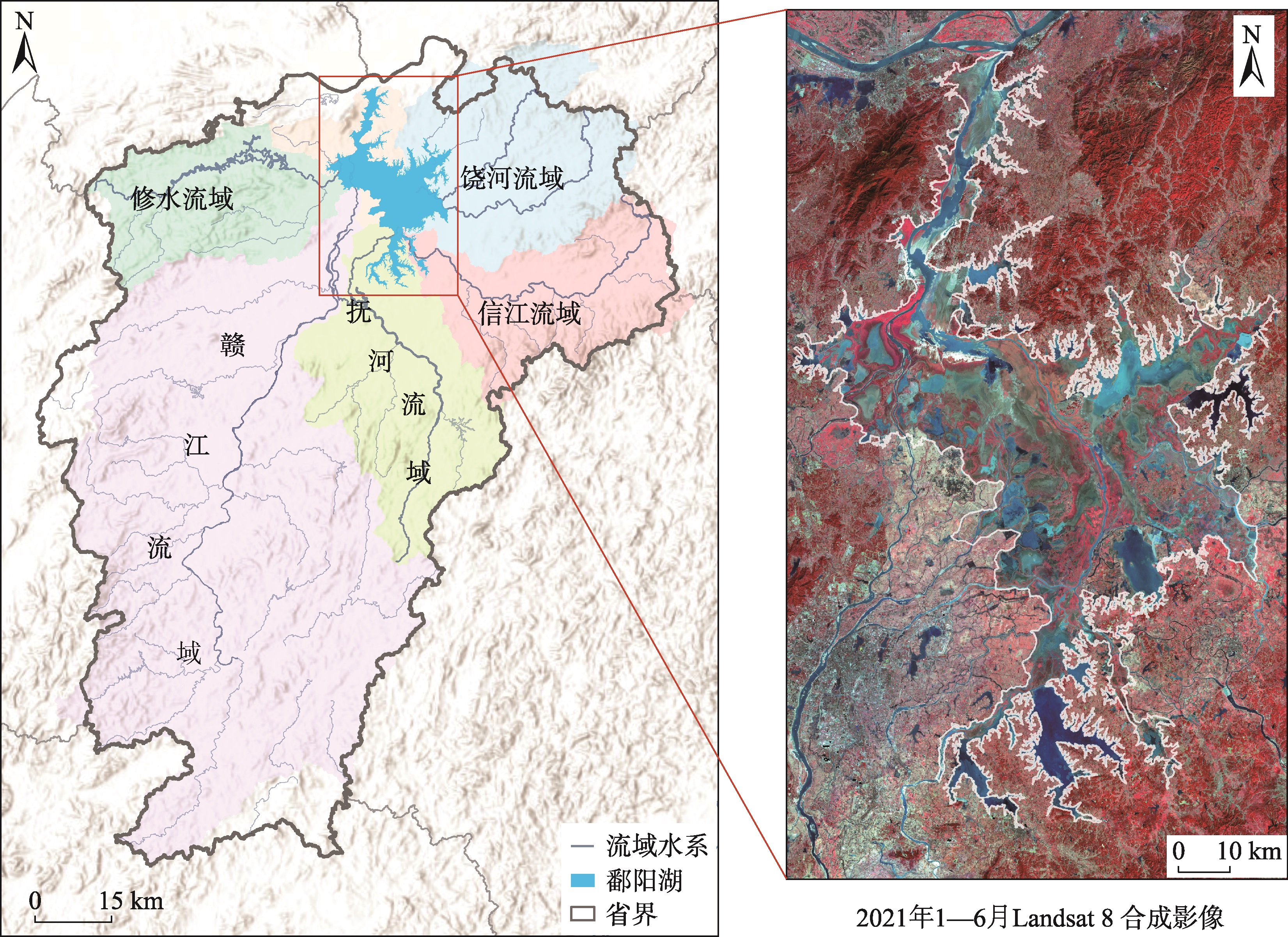
【目的】气候变化下,鄱阳湖区日益突出的干旱灾害严重影响着区内社会经济的可持续发展与生态环境保护。动态监测鄱阳湖旱情的时空特征,深入认识旱情的发生、发展过程,有助于科学制定干旱应对战略,提高区内应灾和减灾能力。【方法】本文基于Landsat和MODIS遥感影像,重建了2000—2023年逐月鄱阳湖水域面积时间序列,在此基础上构建了标准化水体指数(SWI),用以识别湖区的水文干旱事件,刻画不同时间尺度下湖区水文干旱事件的持续时间、间隔时间以及严重程度等特征,同时应用基于事件的干旱传播分析方法,揭示了流域不同来水区气象干旱与湖区水文干旱间的传播与恢复滞后时间。【结果】① 鄱阳湖区水域面积年际波动较为强烈,水域面积年内最大值与最小值的年际变差系数分别为0.13和0.12,表明鄱阳湖区汛期与非汛期出现干旱的可能性大致相当; ② 月尺度上,鄱阳湖区重度干旱事件持续时间、间隔时间和严重程度中值则分别为1个月、6.5个月和-0.25;极端干旱事件对应指标的中值则分别为1个月、8个月和-0.29。随着时间尺度的增加,干旱事件总体上表现出持续时间减小、间隔时间延长而严重程度加剧的规律; ③ 从气象-水文干旱的传播时间上看,在月尺度上,修水,信江和饶河的气象干旱传播至湖区水文干旱的时间约为2个月,快于其它来水区,表明这3个流域的气象干旱对湖区的水文干旱有更为直接的影响。干旱恢复滞时与干旱的传播时间在空间上、不同时间尺度上以及不同的干旱程度上有较高的一致性。【结论】本文提出的基于遥感水域面积的标准化水体指数可有效识别水文干旱事件,拓展了遥感在干旱监测与管理中的应用。本文关于气象-水文干旱传播过程的研究有助于增强区域水文干旱的预测能力。此外,鄱阳湖干旱及其气象-水文干旱传播特性的新认识可为鄱阳湖区的防灾减灾规划与决策提供重要的科学参考与数据支持。
{kind=link}